

環(huán)境信息在機器人自主導航中占據(jù)著舉足輕重的位置,擁有準確的和全局一致的環(huán) 境表示一直是許多研究者關注的熱點。
度量地圖按照距離描述世界,地圖中的距離對應實際世界中的距離。度量地圖的典型例子如城市的比例地圖和建筑物的CAD 圖。對移動機器人來說,可以度量機器人到墻或門的距離等。因此,度量地圖應用于需要準確度量信息的場合,如準確的自定位和優(yōu)化 的路徑規(guī)劃。度量地圖又可被分成兩種:柵格地圖和幾何地圖。
基于柵格的地圖表示方法由Moravec 和Elfes 提出51],在移動機器人的地圖創(chuàng)建中應 用Z為廣泛。它的原理是將整個環(huán)境分成若干大小相同的柵格,每一柵格代表環(huán)境的一 部分,并包含一個表示該單元格被占據(jù)可能性的概率值,如圖所示。

柵格地圖易于創(chuàng)建和維護,對某個柵格的感知信息可以直接對應環(huán)境中的某個區(qū)域, 特別適于處理聲納測量數(shù)據(jù)。但是環(huán)境空間的分辨率與柵格尺寸的大小有關,增加分辨 率將要增加運算的時間和空間復雜度。
基于幾何信息的地圖表示方法是指機器人收集對環(huán)境的感知信息,從中提取更為抽 象的幾何特征,例如線段或曲線,使用這些幾何信息描述環(huán)境[54]。這種表示方法更為緊 湊,且便于位置估計和目標識別。
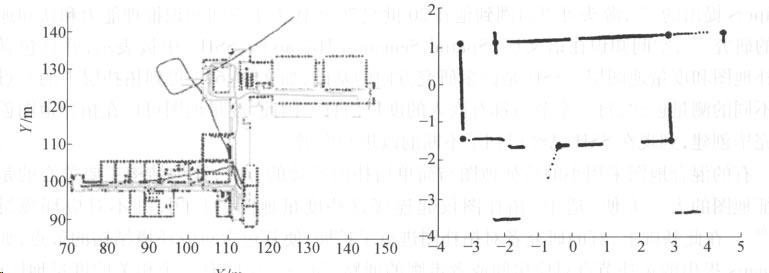
也有些方法提取的幾何特征更為形象化,將環(huán)境定義為 面、角、邊的集合或者墻、走廊、門、房間等,如圖1.53所示。幾何信息的提取需要對感知 信息作額外的處理,且需要一定數(shù)量的感知數(shù)據(jù)才能得到結果,并且?guī)缀蔚貓D所提取的特 征對傳感器的誤差和環(huán)境的不確定性比較敏感。
 |
| 商用機器人 Disinfection Robot 展廳機器人 智能垃圾站 輪式機器人底盤 迎賓機器人 移動機器人底盤 講解機器人 紫外線消毒機器人 大屏機器人 霧化消毒機器人 服務機器人底盤 智能送餐機器人 霧化消毒機 機器人OEM代工廠 消毒機器人排名 智能配送機器人 圖書館機器人 導引機器人 移動消毒機器人 導診機器人 迎賓接待機器人 前臺機器人 導覽機器人 酒店送物機器人 云跡科技潤機器人 云跡酒店機器人 智能導診機器人 |



