

陪護機器人項目是北京航空航天大學機器人研究所承擔的 一 個863課題,用 于助老助殘,醫療陪護。
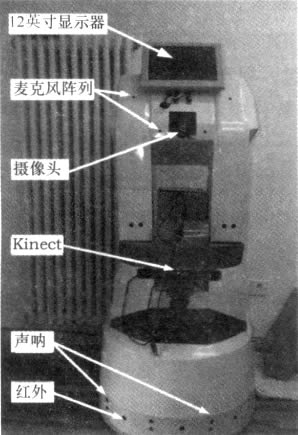
機器人本體如圖2 - 6所示,搭載的外設包括顯示器、麥 克風、攝像頭、 Kinect 、 聲吶和紅外傳感器。顯示器用于與操作用戶交互,顯示 圖形界面控制整個機器人。聲吶和紅外傳感器用于避障。該機器人選用 RGMP-ROS為其操作系統。導航功能是陪護機器人的核心功能之一,里程計和電機控制的管理是導航模塊的關鍵。里程信息定時通過串口從電機控制板中讀取碼 盤計數器獲取;電機的控制指令需要每隔10ms 發 送 一 次 。RGMP-ROS 操 作 系 統良好的實時性能使得陪護機器人的運行非常平穩可靠。
| 資料獲取 | |
| 服務機器人在展館迎賓講解 |
|
| 新聞資訊 | |
| == 資訊 == | |
| » AI 電子安全員「小鐵匠」上崗雄安,天地 | |
| » 分布式機器人體系結構DIRA-利于機器人 | |
| » ALLIANCE機器人系統-用于不均勻多 | |
| » Nerd Herd機器人系統-避障、返回 | |
| » 多機器人系統的體系結構:集中式、 分層式 | |
| » 2026年全球前15名人形機器人-Tec | |
| » 基于具身大模型的多場景智能巡檢機器人系統 | |
| » 中國具身智能市場規模預測分析 | |
| » 中國具身智能市場趨勢量化預測:出貨量翻幾 | |
| » 中國具身智能區域產業集群:三大核心城市競 | |
| » 2026年中國具身智能行業深度分析報告- | |
| » 2026年中國未來產業深度分析報告-機器 | |
| » 2026年全球及中國人形機器人關節模組市 | |
| » 基于世界模型的具身智能技術體系探索:破解 | |
| » 世界模型賦能具身智能的框架設計:四個層級 | |
| == 機器人推薦 == | |

服務機器人(迎賓、講解、導診...) |
|

智能消毒機器人 |
|

機器人底盤 |
 |
